
Prvo, sastav sistema
1. Sistem non-stop detekcije preopterećenja na autoputu se uglavnom sastoji od sistema za prikupljanje informacija o preopterećenju prednjeg teretnog vozila i forenzičkog sistema i pozadinskog upravljanja informacijama o preopterećenju teretnog vozila.
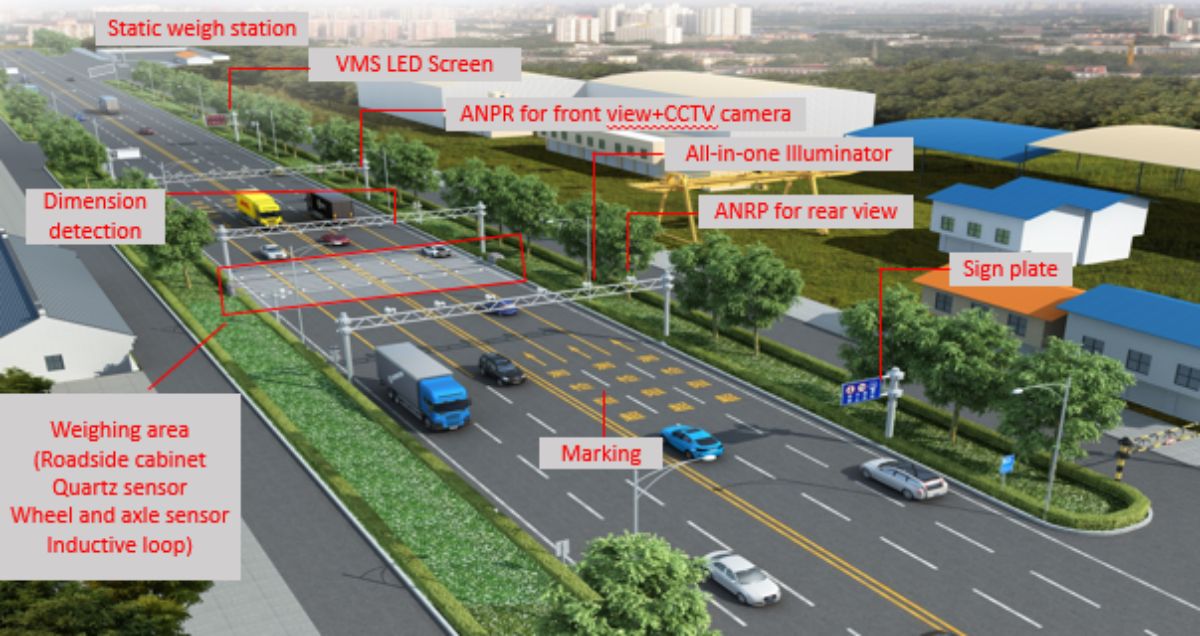
2. Prednji sistem za prikupljanje informacija o preopterećenju teretnog vozila i forenzički sistem se općenito sastoji od opreme za non-stop vaganja, opreme za detekciju veličine profila vozila, opreme za prepoznavanje i snimanje registarskih tablica, detektora vozila, opreme za video nadzor, opreme za oslobađanje informacija, saobraćajnih znakova, napajanja i objekata za zaštitu od groma, ormara za kontrolu na licu mjesta, opreme za prikupljanje i obradu informacija, opreme za otkrivanje saobraćajnih znakova, te opreme za otkrivanje saobraćajnih znakova koji podržavaju mrežni prijenos objekata.
3. Pozadinska platforma za upravljanje informacijama o preopterećenju teretnih vozila (uključujući direktnu provedbu) općenito se sastoji od platformi za upravljanje informacijama o preopterećenju okruga (okruga), općina i pokrajina (uključujući direktnu provedbu).
2. Funkcionalni zahtjevi
1. Funkcionalni zahtjevi za non-stop opremu za vaganje
1.1 Raspon radne brzine
Raspon brzine opreme za vaganje bez zaustavljanja je (0,5~100) km/h za prolazak teretnih vozila kroz područje non-stop detekcije.
1.2 Nivo tačnosti ukupne težine vozila
(1) Najveća dozvoljena greška vaganja ukupne mase vozila i tereta unutar dozvoljenog opsega radne brzine opreme za vaganje bez zaustavljanja ne smije biti niža od odredbi i zahtjeva nivoa tačnosti 5 i 10 u JJG 907 „Propisi za verifikaciju automatskog uređaja za vaganje za dinamičko autoputsko vozilo 2-1T“ (1T).
Tabela 2-1 Maksimalna dozvoljena greška dinamičkog vaganja ukupne težine vozila
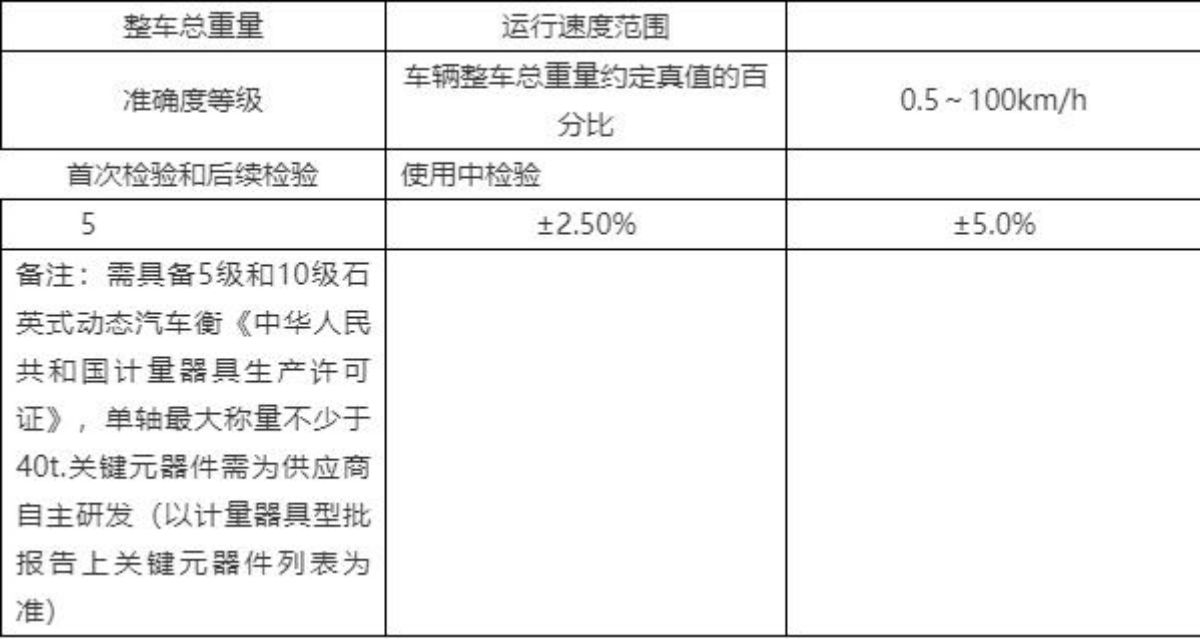
(2) Kada teretno vozilo prođe kroz područje za otkrivanje vaganja bez zaustavljanja sa nenormalnim ponašanjem u vožnji kao što su često ubrzanje i usporavanje, skakanje na vagi, zaustavljanje, S krivina, ukrštanje, tlačna linija, vožnja unazad ili zaustavljanje i kretanje u kratkom vremenskom periodu, nivo tačnosti ukupne težine vozila non-stop vaganja ne smije biti niži od zahtjeva opreme za vaganje u tabeli-1. (Važni su prelazak na trake i vožnja u suprotnom smjeru).
1.3 Merna ćelija koja se koristi u opremi za vaganje bez zaustavljanja mora biti u skladu sa odredbama i zahtjevima GB/T7551 "Čelija za opterećenje", radni vijek će biti ≥ 50 miliona osovina, a nivo zaštite mjerne ćelije koja se koristi u non-stop vaganju ne smije biti niži od IP68. 。
1.4 Prosječno vrijeme nesmetanog rada opreme za vaganje bez prekida ne smije biti manje od 4000h, a garantni rok ključnih komponenti ne smije biti manji od 2 godine, a vijek trajanja ne smije biti manji od 5 godina.
1.5 Zahtjevi za zaštitu od isključenja
(1) Kada je napajanje isključeno, oprema za vaganje bez prestanka bi trebala biti u mogućnosti automatski pohraniti trenutno postavljene parametre i informacije o vaganju, a vrijeme skladištenja ne bi trebalo biti kraće od 72 sata.
(2) U slučaju nestanka struje, vrijeme rada unutrašnjeg sata opreme za vaganje bez prekida ne smije biti manje od 72d.
1.6 Zahtjevi za antikorozivnu obradu
Izložene metalne dijelove opreme za non-stop vaganje treba tretirati antikorozivnom obradom u skladu sa relevantnim odredbama GB/T18226 "Tehnički uvjeti za antikorozivnu zaštitu čeličnih komponenti u inženjerstvu autoputa".
1.7 Greška mjerenja brzine detektora vozila opreme za vaganje bez zaustavljanja treba da bude ≤± 1km/h, a tačnost detekcije saobraćajnog toka treba da bude ≥99%.
1.8 Tehnički zahtjevi za separatore vozila za non-stop opremu za vaganje su sljedeći:
(1) Preciznost detekcije broja osa treba da bude ≥98%.
(2) Greška detekcije razmaka osovine treba biti ≤± 10 cm.
(3) Tačnost klasifikacije vozila treba da bude ≥ 95%.
(4) Stopa međukanalnog prepoznavanja treba da bude ≥98%.
1.9 Primjenjivi raspon temperature radnog okruženja treba da bude od -20°C~+80°C, a tehnički pokazatelji otpornosti na vlagu okoline trebaju ispunjavati relevantne propise i zahtjeve vanjske mehaničke i električne opreme JT/T817 "Opšti tehnički zahtjevi i metode ispitivanja opreme za elektromehanički sistem na autoputu".
1.10 Treba preduzeti mere za zaštitu od kiše i prašine, a nivo zaštite treba da ispunjava odredbe i zahteve JT/T817.

2. Funkcionalni zahtjevi za opremu za ispitivanje veličine profila vozila
2.1 Kada teretno vozilo prođe kroz područje non-stop detekcije vaganja brzinom (0,5~100) km/h, ono bi trebalo biti u mogućnosti da automatski završi brzu detekciju geometrijskih dimenzija i 3D modela dužine, širine i visine teretnog vozila u realnom vremenu i isporuči ispravne rezultate identifikacije. Vrijeme odgovora ne smije biti manje od 30 ms, a vrijeme dovršetka jedne detekcije i izlaznog rezultata ne smije biti duže od 5 s.
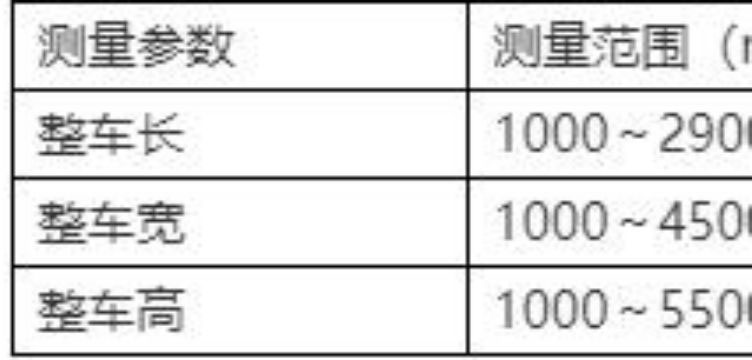
2.2 Geometrijski opseg mjerenja dužine, širine i visine teretnog vozila mora zadovoljiti zahtjeve Tabele 2-2.
Tabela 2-2 Opseg mjerenja opreme za ispitivanje veličine profila vozila
2.3 Rezolucija mjerenja geometrijskih dimenzija dužine, širine i visine teretnog vozila nije veća od 1 mm, a greška mjerenja opreme za detekciju obrisa vozila trebala bi zadovoljiti sljedeće zahtjeve u rasponu od 1 ~ 100 km/normalne radne brzine: (u smislu brzine trčanja, treba biti u skladu sa zahtjevima prethodne opreme za dinamičko vaganje).
(1) Greška u dužini≤±500mm;
(2) Greška u širini≤±100mm;
(3) Greška visine ≤± 50 mm.
2.4 Frekvencija laserske detekcije spotova opreme za testiranje veličine profila vozila trebala bi biti ≥1kHz i trebala bi imati 9 tipova modela vozila i funkcije detekcije brzine vozila koje su navedene u motornom vozilu GB1589 "Okvirna veličina, osovinsko opterećenje i ograničenja kvaliteta automobila, prikolica i automobilskih vozova".
2.5 Trebalo bi da ima funkcije paralelnih teretnih vozila, procjenu stanja vožnje u S-krivinu, zaštitu od crnog materijala i detekciju geometrijske veličine profila teretnog vozila od materijala visoke refleksije.
2.6 treba da sadrži klasifikaciju modela teretnih motornih vozila, obim saobraćaja, brzinu lokacije, prednju vremensku udaljenost, praćenje procenta automobila, razmak ispred, funkcije detekcije vremena zauzetosti. A tačnost klasifikacije modela teretnih motornih vozila trebala bi biti ≥ 95%.
2.7 Primjenjivi raspon temperature radnog okruženja treba da bude od -20 °C ~ +55 °C, a tehnički pokazatelji otpornosti na vlagu okoline trebaju ispunjavati relevantne propise i zahtjeve vanjske mehaničke i električne opreme JT/T817 "Opšti tehnički zahtjevi i metode ispitivanja opreme za elektromehanički sistem na autoputu".
2.8 Oprema za ispitivanje veličine laserskog profila vozila treba biti instalirana sa portalom sa kanalom za održavanje
2.9 Nivo zaštite opreme za ispitivanje veličine profila vozila ne smije biti niži od IP67.
3. Funkcionalni zahtjevi za opremu za prepoznavanje i snimanje registarskih tablica
3.1 Funkcionalni zahtjevi opreme za prepoznavanje i snimanje registarskih tablica moraju zadovoljiti relevantne odredbe i zahtjeve GB/T 28649 "Automatski identifikacijski sistem za registarske tablice motornih vozila".
3.2 Oprema za prepoznavanje i hvatanje registarskih tablica mora biti opremljena svjetlom za punjenje ili trepćućim svjetlom, koje će biti u stanju da jasno snimi broj vozila koje prolazi kroz područje non-stop detekcije vaganja pod bilo kojim vremenskim uvjetima i da isporuči tačan rezultat identifikacije.
3.3 Oprema za prepoznavanje i snimanje registarskih tablica treba da bude ≥ 99% tačnosti prepoznavanja registarskih tablica tokom dana, i ≥95% tačnosti prepoznavanja registarskih tablica noću, a vrijeme prepoznavanja ne smije biti duže od 300 ms.
3.4 Slika prikupljene registarske tablice teretnog vozila treba biti jasno objavljena u JPG formatu pune širine, a rezultat prepoznavanja treba uključivati vrijeme prepoznavanja, boju registarske tablice itd.
3.5 prepoznavanje registarskih tablica, pikseli slike za snimanje ne bi trebali biti manji od 5 miliona, ostali pikseli slike za snimanje ne bi trebali biti manji od 3 miliona, teretna vozila kroz područje detekcije vaganja bez zaustavljanja, trebaju snimiti prednji dio vozila, dvije strane vozila i stražnji dio vozila ukupno najmanje 4 slike visoke definicije.
3.6 Prema prednjoj slici visoke definicije, područje registarske tablice teretnog vozila, karakteristike prednje i kabine, prednja boja itd., treba da budu u stanju da jasno razlikuju broj osovina, boju karoserije i osnovnu situaciju transportirane robe prema informacijama o slici visoke definicije na bočnoj strani vozila; prema informacijama o slici visoke definicije stražnjeg dijela vozila, može se razlikovati broj stražnje registarske tablice, boja karoserije i druge informacije.
3.7 Svaka slika treba da bude prekrivena informacijama kao što su datum detekcije, vreme testiranja, lokacija testiranja, ukupna težina vozila i tereta, dimenzije vozila, broj opreme za forenzičku sliku, antifalsifikovanje i druge informacije.
3.8 Propusni opseg kanala za prijenos informacija o snimljenoj slici ne smije biti manji od 10 Mbps.
3.9 Trebao bi imati funkcije samoprovjere grešaka kao što su nenormalna komunikacija i nestanak struje.
3.10 Primjenjivi raspon temperature radnog okruženja treba da bude od -20 °C ~ +55 °C, a tehnički pokazatelji otpornosti na vlagu okoline trebaju ispunjavati relevantne propise i zahtjeve vanjske mehaničke i električne opreme JT/T817 "Opšti tehnički zahtjevi i metode ispitivanja opreme elektromehaničkog sistema na autoputu".
3.11 Nivo zaštite opreme za prepoznavanje i snimanje registarskih tablica ne smije biti niži od IP67.
4 Funkcionalni zahtjevi opreme za video nadzor
4.1 kamera za video nadzor treba da ima funkciju infracrvene dnevne i noćne kamere, i treba da bude u stanju da non-stop detektuje područje vaganja funkcije sveobuhvatne kamere, i da sačuva najmanje 10 sekundi nelegalnog teretnog vozila o preopterećenju dokaza o prikupljanju video podataka.
4.2 Trebalo bi da ima funkcije samodijagnoze, kalibracije vidnog polja i automatske kompenzacije.
4.3 Forenzičke video slike ne bi trebale biti manje od 3 miliona piksela, te bi trebale biti jasne i stabilne.
4.4 Trebalo bi da ima funkciju rotacije i zumiranja, a horizontalna i vertikalna rotacija i zumiranje objektiva mogu se izvršiti prema kontrolnoj komandi.
4.5 Trebao bi imati funkciju čišćenja i uklanjanja svjetala za maglu za kišu i mraz, te bi trebao biti sposoban na vrijeme očistiti, zagrijati i odlediti zaštitni poklopac.
4.6 Forenzičke video slike trebale bi se prenijeti na okružni (gradski) nivo za upravljanje informacijama o preopterećenju i platformu za direktnu provedbu u realnom vremenu.
4.7 Oprema za video nadzor i drugi tehnički pokazatelji njene opreme moraju ispunjavati relevantne odredbe i zahtjeve GA/T995.
4.8 Primjenjivi raspon temperature radnog okruženja treba da bude -20°C~+55°C, a tehnički pokazatelji otpornosti na vlagu okoline trebaju ispunjavati relevantne propise i zahtjeve vanjske mehaničke i električne opreme JT/T817 "Opšti tehnički zahtjevi i metode ispitivanja opreme elektromehaničkog sistema na autoputu".
5 Funkcionalni zahtjevi za opremu za objavljivanje informacija
5.1 Trebalo bi da bude u mogućnosti da u realnom vremenu objavi informacije o preopterećenju vozila vozaču ilegalnog preopterećenog vozila.
5.2 Trebalo bi biti u mogućnosti da objavi i prikaže informacije kao što su izmjena teksta i pomicanje.
5.3 Glavni funkcionalni indikatori i tehnički indikatori LED promjenjivih informativnih znakova za autoput moraju ispunjavati relevantne odredbe i zahtjeve GB/T23828 "Varijabilni informativni znakovi sa LED diodama za autoput".
5.4 Dvostubni portalni tip autoputa sa LED promjenjivim informacijskim znakom ekran za prikaz uobičajeno korištenog razmaka piksela može se odabrati: 10 mm, 16 mm i 25 mm. Veličina površine prikaza od četiri trake i šest traka može biti 10 kvadratnih metara, odnosno 14 kvadratnih metara. Format sadržaja prikaza može biti 1 red i 14 stupaca.
5.5 Razmak piksela jednostubnog LED displeja sa promenljivim informacijama može se odabrati: 10 mm, 16 mm i 25 mm. Veličina ekrana može se odabrati između 6 kvadratnih metara i 11 kvadratnih metara. Format sadržaja prikaza može biti 4 reda i 9 stupaca.
5.6 Dizajn i postavljanje LED promjenjivih informativnih znakova za autoput i udaljenost vizualnog prepoznavanja treba u potpunosti uzeti u obzir stvarnu brzinu i potrebe vizualnog prepoznavanja teretnih vozila na dionici puta, te zadovoljiti relevantne odredbe i zahtjeve GB/T23828 "Led promjenjivi informativni znakovi za autoput".
6 Zahtjevi za postavljanje saobraćajnih znakova
6.1 Postavite saobraćajni znak za ulazak u „zonu non-stop vaganja i detekcije” na udaljenosti ne manjoj od 200 metara ispred zone za non-stop detekciju vaganja.
6.2 Postavite saobraćajni znak "zabranjeno mijenjanje trake" najmanje 150 metara ispred područja za detekciju vaganja bez zaustavljanja.
6.3 Postavite saobraćajni znak "Ukinite zabranu promjene trake" na udaljenosti ne manjoj od 200 metara iza područja detekcije non-stop vaganja.
6.4 Postavljanje saobraćajnih znakova u području detekcije vaganja bez zaustavljanja mora biti u skladu sa dizajnom i zahtjevima GB5768 "Snakovi i oznake na cesti".
7. Zahtjevi za opremu za napajanje i gromobransko uzemljenje
7.1 Sistem za prikupljanje informacija o preopterećenju i forenzički sistem mora biti opremljen stabilnim i pouzdanim linijama napajanja, koje će biti u stanju da ispune zahtjeve 24-časovnog neprekidnog rada napajanja.
7.2 Potrebne mjere zaštite od groma i prenapona će se poduzeti za interfejs za napajanje i kontrolni interfejs za prikupljanje informacija o preopterećenju i forenzički sistem i povezane komponente, a zaštitne mjere moraju biti u skladu sa relevantnim odredbama i zahtjevima JT/T817 "Opšti tehnički zahtjevi i metode ispitivanja za opremu elektromehaničkog sistema na autoputu".
7.3 Sistem za prikupljanje informacija o preopterećenju i forenzički sistem treba da usvoji metod uzemljenja u blizini jedne tačke, a metod paralelnog uzemljenja jednosmerne struje treba da bude usvojen.
7.4 Zaštita od groma i električni otpor opreme za prikupljanje informacija o preopterećenju i forenzičke opreme treba da bude ≤ 10 Ω, a otpor zaštitnog uzemljenja treba da bude ≤ 4 Ω.
8 Funkcionalni zahtjevi kontrolnog ormara na terenu

8.1 Kontrolni ormar na licu mjesta konfigurisan sa sistemom za prikupljanje informacija o preopterećenju i forenzičkim sistemom trebao bi biti u stanju da pohrani procesore za prikupljanje podataka, detektore vozila, mrežne prekidače i drugu opremu. Trebalo bi da bude u mogućnosti da otpremi informacije o preopterećenju kamiona na Sveobuhvatnu administrativnu platformu za direktno sprovođenje saobraćajnog centra Pokrajinskog odeljenja za saobraćaj i da može da prenese informacije o preopterećenju kamiona na promenljivu informaciju o LED znaku autoputa u realnom vremenu za objavljivanje i prikaz.
8.2 Upravljački ormar će biti dizajniran sa dvoslojnom zaptivkom šasije, koja može efikasno spriječiti prašinu i kišu, i imati nezavisni sistem kontrole temperature.
8.3 Upravljački ormar bi trebao biti dizajniran s utorima kako bi se olakšalo proširenje funkcije.
8.4 Upravljački ormar mora biti opremljen opremom za zaštitu podataka kako bi se izbjeglo curenje podataka za detekciju prekoračenja.
9. Zahtjevi za postavljanje područja non-stop vaganja za preopterećenje autoputa
9.1 Područje za non-stop detekciju vaganja sastoji se od non-stop nosača opreme za vaganje (senzor kvarcnog kristala) i njegovih dijelova za vođenje na prednjem i stražnjem kraju (prema očvrsloj površini puta od 30 metara ispred i 15 metara pozadi) (Slika 2-1).

Slika 2-1 Šematski dijagram područja neprekidnog vaganja
9.2 Lokacija područja za neprekidno vaganje i testiranje ne bi trebala biti locirana u ravnici, radijus uzdužne krivine je mali, vidljivost je loša, a dugi nizbrdo i druge dionice puta, a linearni indikatori trebaju ispunjavati ASTM E1318 "Standardne specifikacije za sisteme za vaganje u pokretu na autoputu i zahtjeve korisnika (WIM). Metode, specifični zahtjevi su sljedeći:
(1) Radijus skretanja središnje linije puta 60m dionice vodilice i stražnje dionice vodećih cesta od 30m u području neprekidne detekcije vaganja treba biti ≥ 1,7km.
(2) Uzdužni nagib površine puta u prednjem odsjeku vodilice od 60 m i stražnjem dijelu vodećih cesta od 30 m u području detekcije vaganja bez zaustavljanja treba biti ≤2%.
(3) Vrijednost poprečnog nagiba kolovoza i prednjeg 60 m vodećih dionica puta i stražnjeg 30 m vodećih dionica puta bez zaustavljanja područja detekcije vaganja treba da zadovoljava 1% ≤ i ≤2%.
(4) Ne bi trebalo da postoje prepreke koje blokiraju vidokrugu vozača unutar 150 m dionice puta za vođenje prije područja detekcije non-stop vaganja.
(5) Udaljenost između lokacije područja neprekidnog vaganja i detekcije i ulaza i izlaza iz tunela autoputa na istoj dionici puta ne smije biti manja od 2 km i ne smije biti manja od 1 km.
(6) Horizontalna greška veze između senzora i površine puta nije veća od 0,1 mm
9.3 Kako bi se osigurala tačnost podataka vaganja bez zaustavljanja i sigurnost vožnje, izolacija kolovozne trake prednjeg 60 m vodećih dionica puta i stražnje 30 m dionice vodećih puta u području detekcije neprekidnog vaganja treba biti izolovana punom linijom.
9.4 Prostor za neprekidno vaganje i testiranje za vođenje izgradnje dionica puta
(1) Kolovoz dionice vodilice treba da bude stabilan, a koeficijent trenja kolovoza treba da odgovara projektnim zahtjevima dionice puta.
(2) Kolovozna površina dionice vodilice treba da bude glatka i kompaktna, a na asfaltnom kolovozu ne smije biti kolovoza, rupa, slijeganja, zagušenja, pukotina, mrežnih pukotina i ispupčenja, a na cementnom kolovozu ne smije biti poremećenih, polomljenih ploča, sleganja, nakupljanja blata i drugih bolesti. Ravnost cementno-betonskog kolovoza i asfaltno-betonskog kolovoza mora ispunjavati relevantne odredbe i zahtjeve JTGF80-1 "Standardi za inspekciju i evaluaciju kvaliteta inženjeringa autoputeva".
(3) Širina površine puta vodećih dionica puta treba da bude u stanju da podrži normalan prolaz najšireg teretnog vozila unutar raspona vaganja.
(4) Središnja linija kolovoza u području neprekidnog vaganja i ispitivanja treba biti izolirana dvostrukim žutim (jednostrukim žutim) punim linijama, a linija razgraničenja traka treba biti izolirana bijelim punim linijama.
3. Zahtjevi protokola sučelja i formata podataka
Protokol interfejsa i format podataka sistema non-stop detekcije preopterećenja na autoputu treba da ispunjava relevantne odredbe i zahteve "Fujian sveobuhvatnog administrativnog plana projektovanja direktnog sprovođenja saobraćaja" kako bi se osigurala međusobna povezanost i razmena informacija između platformi za upravljanje informacijama o preopterećenju okruga (okruga), opština i pokrajina (uključujući direktnu promenu).

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Ured Chengdu: br. 2004, jedinica 1, zgrada 2, br. 158, 4. ulica Tianfu, zona visoke tehnologije, Chengdu
Ured u Hong Kongu: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Tvornica: zgrada 36, industrijska zona Jinjialin, grad Mianyang, provincija Sichuan
Vrijeme objave: Jan-25-2024




